了解切換器的基本概念,包含極/投的常見命名方式、常開 (NO) 與常關 (NC) 術語、不同的切換拓撲、各種切換器類型等等,例如電磁式機械繼電器、簧片繼電器、場效電晶體 (FET) 切換器。 此線上教學屬於「儀器基本原理」系列的一部份。
1. 命名方式
切換器是一種可以用來建立/中斷電路連結的裝置。 切換器又稱為繼電器。 雖然這 2 個詞彙經常互用,然而單一切換器通常稱為繼電器,而切換器則指多個繼電器的組合。
切換器可以是單一設計中的永久元件,也可做為用來測試機板的儀器。 切換器在做為儀器時,通常還具備額外的功能,例如可當做多功能數位電錶 (DMM)。 針對應用選擇切換器時,必須先了解不同類型的切換器。
極/投
一個切換器至少有 2 個端點:一個用來接收訊號,另一個則用來發送訊號。 切換器的「極」為輸入端點,用來定義切換器可控制的獨立切換器數量。 切換器的「投」為輸出端點,用來定義各個切換器的「極」可連接的輸出連結數量。 切換器主要按照極數與投數分類。
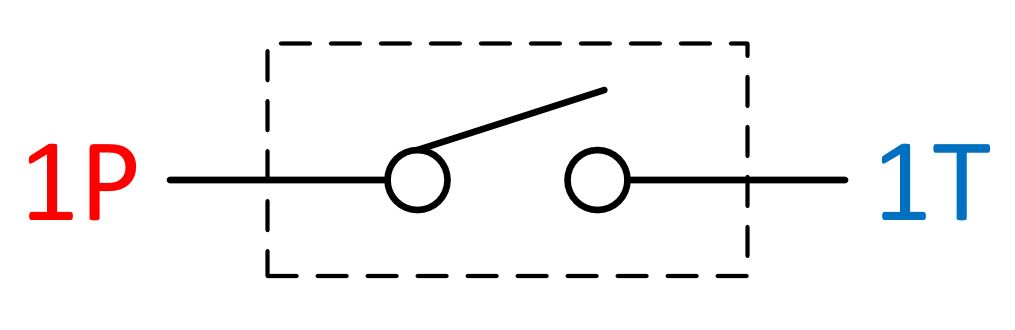
最簡單的切換器是單極單投 (SPST) 切換器。 正如名稱所示,此切換器可控制單一電路並連接單一輸出。 此切換器不是處於關閉狀態,便是完全中斷連結。 對於僅需開/關狀態的應用而言,SPST 不但相當實用,也是最常見的瞬間切換器。 瞬間切換器只有在致動時才處於關閉的狀態,例如在磁場中開關的按鈕或簧片切換器。
圖 1. SPST 切換器適用於僅需開/關狀態的應用,例如瞬間切換器。
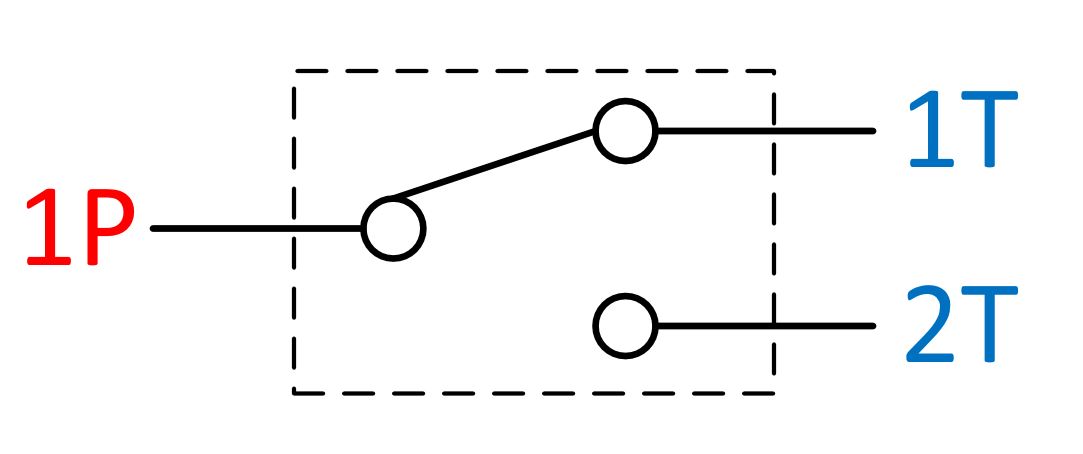
單極雙投 (SPDT) 切換器可將單一輸入電路路由至 2 個輸出電路的其中之一。 此切換器可在 2 個選項中進行選擇,例如電源或 DMM。此切換器因可選擇 A 或 B 選項,所以又叫做 A/B 切換器,也稱為轉換切換器。 滑動切換器通常都是 SPDT。
圖 2. SPDT 切換器對於需要 2 個選項的切換器而言相當實用,例如滑動切換器。
雖然 SPDT 切換器具備雙投,可置放的位置卻不只 2 種。 SPDT 除了可連接至雙投之外,也可不要連接任何輸出,置於中間位置, 因此又叫做中心開放切換器。
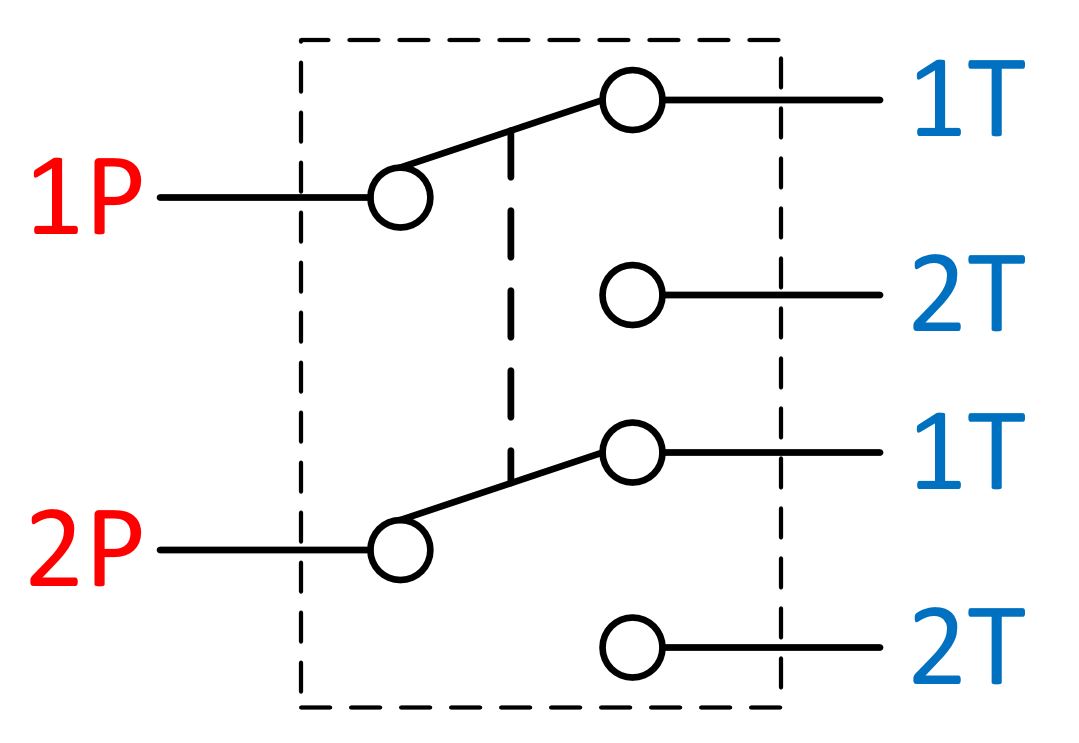
雙極雙投 (DPDT) 切換器具備 2 個極,每個極皆有 2 個投。 此切換器一共有 6 個端點。 這個切換器有點像是透過單一致動器執行切換的 2 個 SPDT 切換器。 此切換器因可交錯連接端點,而經常用於相位或極性逆變。
圖 3. DPDT 切換器基本上就是 2 個可同時切換的 SPDT 切換器,經常用於相位或極性逆變。
SPST、SPDT 與 DPDT 切換器最為常見,不過您還是可以找到具備更多投/極的切換器。 例如旋轉切換器便具備多投。
常開、常關與切換形式
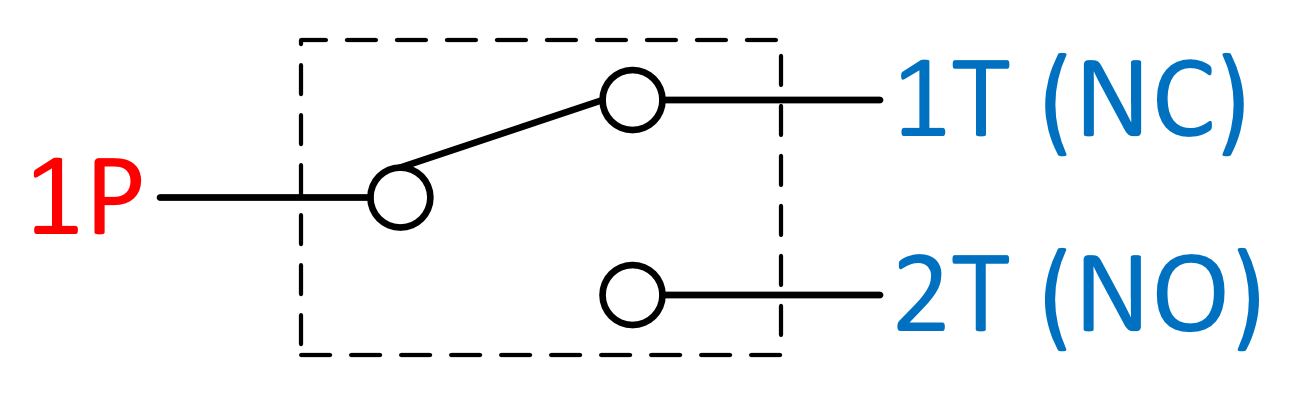
重新檢視圖 1 便會發現其中的 SPST 切換器即處於開路狀態。 此即所謂的常開 (NO) 切換器。 致動 NO 切換器後,便會關閉電路。 SPST NO 切換器又稱為 Form A 切換器,處於開路狀態時也可稱為 NO 接點。
另一種切換器則稱為常關 (NC) 切換器。 NC 切換器預設為通路狀態。 SPST NC 切換器又稱為 Form B 切換器,處於閉路狀態時也可稱為 NC。
圖 4. 切換器通常處於圖 1 的常開狀態,或如上圖所示處於常關狀態。
端點本身也可使用與上述相同的命名方式。 舉例而言,圖 2 中 SPDT 切換器上方的 1T 端點即可稱為 NC,而 2T 端點則可稱為 NO。DPDT 具備 2 個 NC 端點與 2 個 NO 端點。
圖 5. 可將個別端點命名為 NC 與 NO 端點。
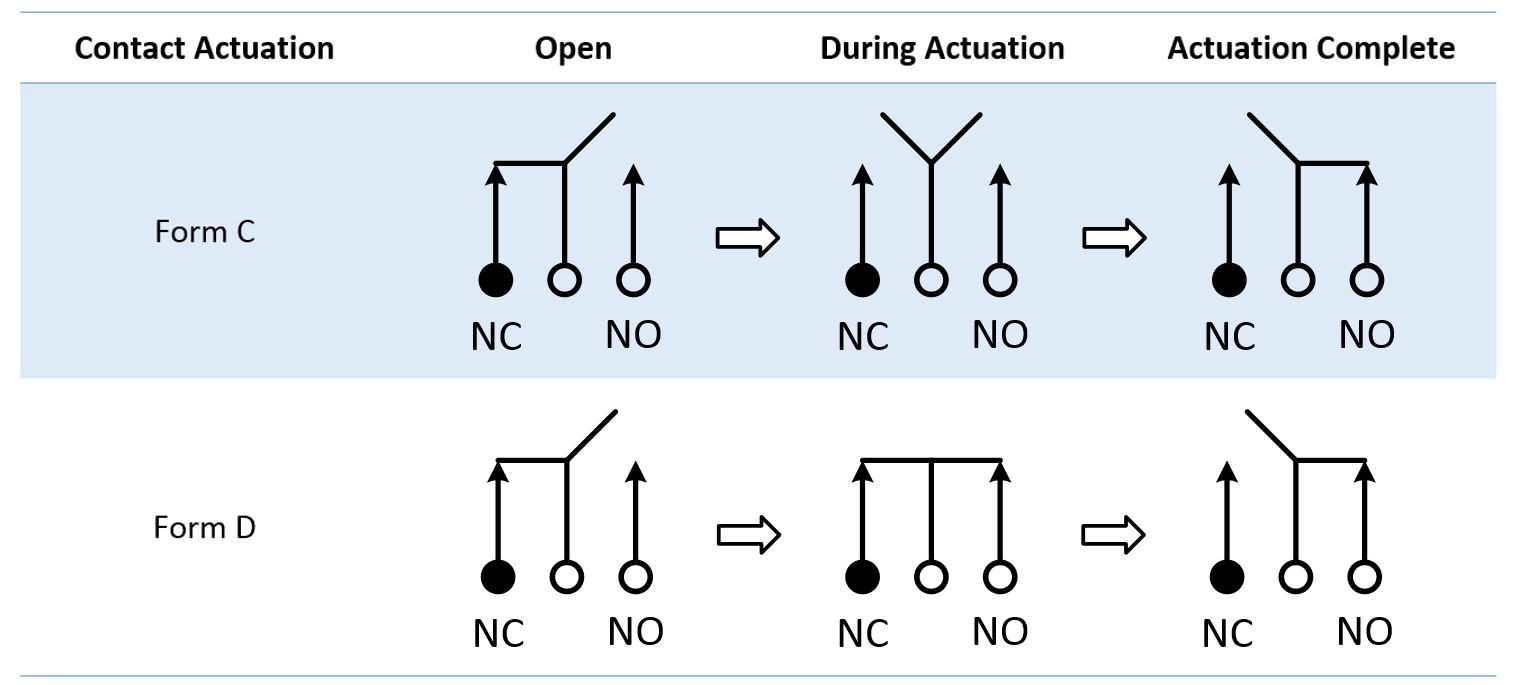
SPDT 擁有 2 種主要形式。 Form C 切換器會先中斷原始連線再建立新連線,這種現象又稱為「先斷後合」(BBM)。 Form D 切換器則會同時接通新舊連線,再中斷原始連線;這可稱為「先合後斷」切換器。
圖 6. Form C 與 Form D 切換器又可分別稱為「先斷後合」、「先合後斷」切換器。
拓撲
切換器拓撲是一種組織結構,用以呈現切換器模組中的通道與繼電器。 通用拓撲切換器包含一組獨立的切換器或多個 SPST、SPDT 或 DPDT 切換器。 這些切換器在切換高電流負載時相當實用,例如功率與負載切換。
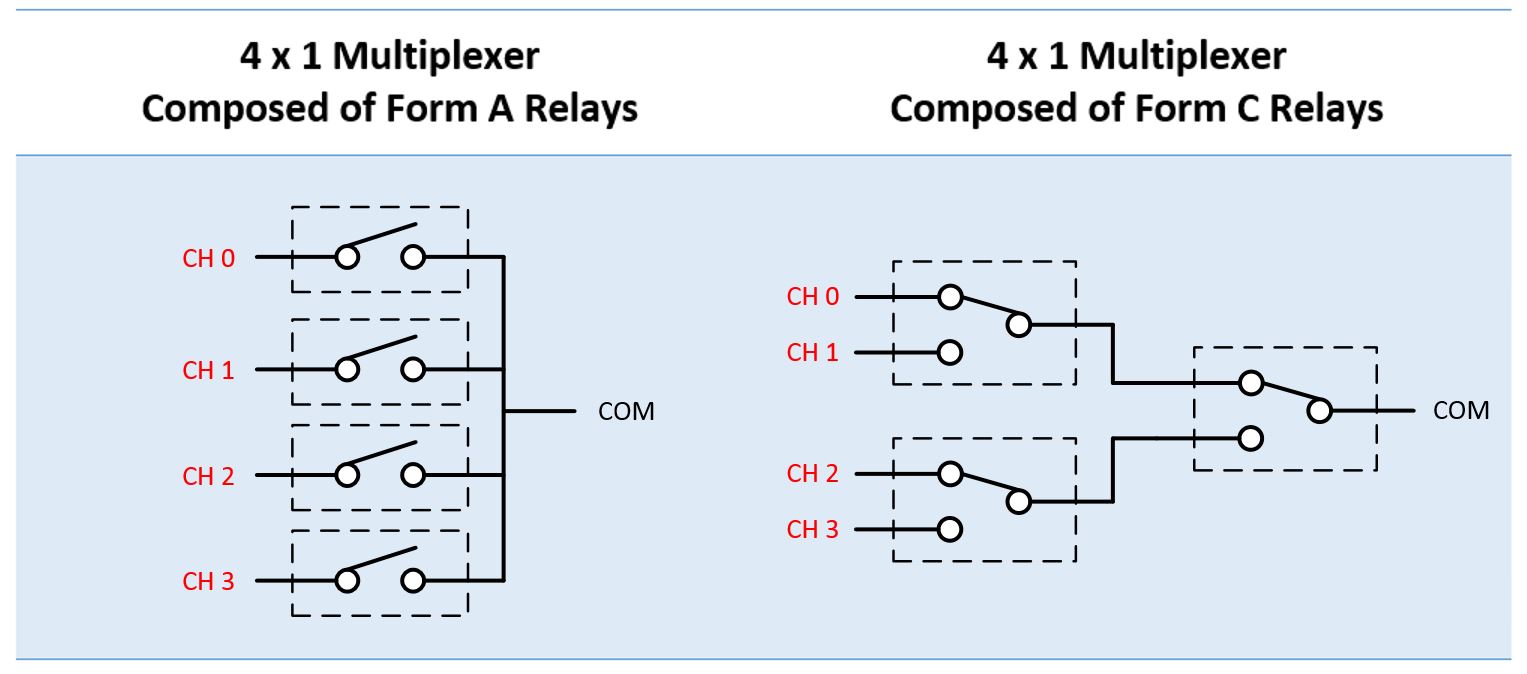
多工器 (mux) 是另一種形式的拓撲,您可以將多工器的單一輸入連接至多個輸出,或將單一輸出連接至多個輸入。 多工器的名稱通常以輸入數量 x 輸出數量表示。 舉例而言,使用 4:1 或 4 x 1 mux 即可將 4 個輸入連接至單一輸出。 如需使用示波器量測多個訊號,或是透過函式產生器將訊號連接至不同的點,此拓撲便相當實用。 根據您的應用需求,此拓撲可提供不同的切換形式。
圖 7. 您可以透過 mux 將多個輸入連接至單一輸出,也可將多個輸出連接至單一輸入,還可根據應用需求,提供不同的切換形式。
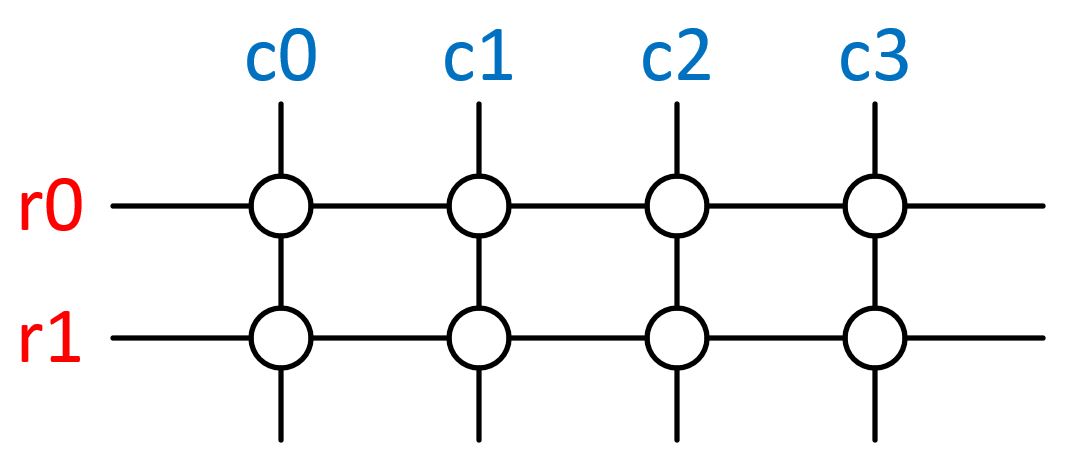
有了這種矩陣拓撲,便能夠將多個輸入連接至多個輸出,且組織結構呈行列形式。 您可以將任一行連接至任何數量的列,也能將任一列連接至任何數量的行。切換器就位於每個行列的交接處。 一旦切換器呈閉路狀態,列就會連接至行。 此拓撲雖然比其他拓撲更為複雜,卻能為應用帶來極佳的靈活彈性。
圖 8. 您可使用 2 x 4 矩陣切換,將多個輸入連接至多個輸出。
2. 繼電器類型
除了了解不同的切換器設定之外,還須了解不同類型的繼電器。
電磁式機械繼電器
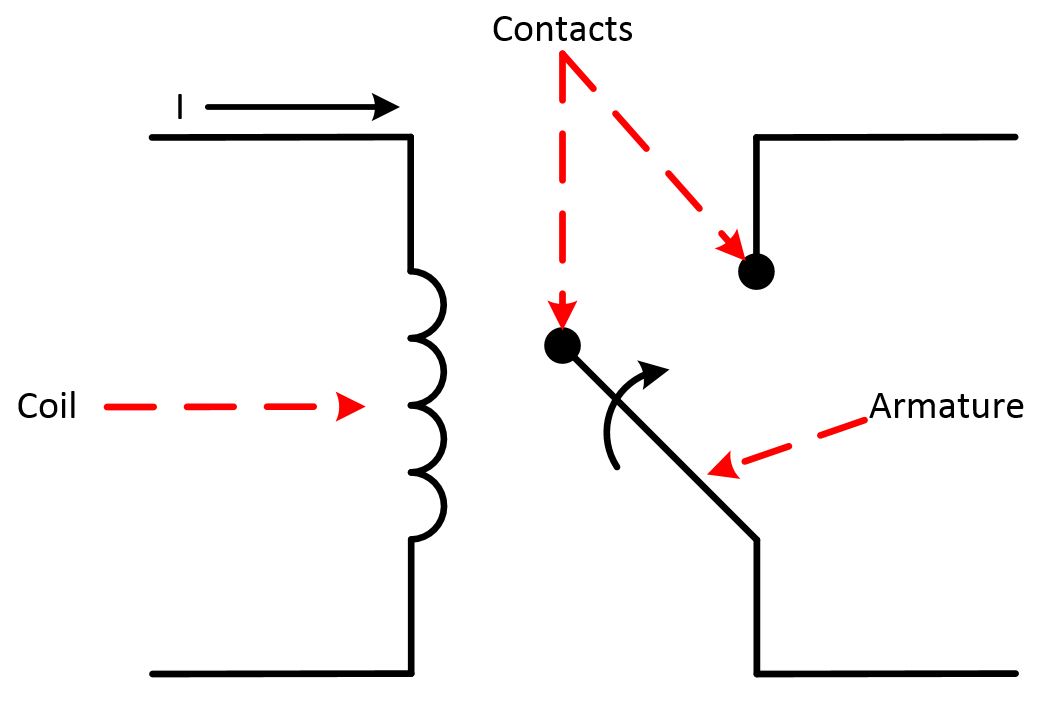
電磁式機械繼電器是以電力操作的切換器,使用機械接點做為切換機制。 電磁式機械繼電器又稱為電樞繼電器。 此繼電器主要由線圈與接點所組成。 線圈通電後會產生磁場並推動電樞,進而開啟或關閉接點。
圖 9. 電磁式機械繼電器是以電力操作的切換器,使用機械接點做為切換機制。
電磁式機械繼電器支援多種訊號特性,諸如低電壓/電流、高電壓/電流、DC 與 GHz 頻率等。 因此您可輕易找到訊號特性符合系統需求的電磁式機械繼電器。
不過,電磁式機械繼電器上的接點通常都比其他繼電器大,也更為堅固耐用。 由於電磁式機械繼電器的接點較大,因此更能承受電路或接線中寄生電容意外產生的浪湧電流。 然而,接點較大,就代表整個組合的體積也變大了,因此無法密集安裝在切換器模組上。
雖然電磁式機械繼電器的機械構造有助於提高切換彈性,但這種切換器卻有個重大弱點:速度有限。 電磁式機械繼電器的速度比其他繼電器慢,切換與穩定時間大概是 5 ~ 15 毫秒。對某些應用來說,這樣的運作速度可能太慢了。
電磁式機械繼電器的機械壽命通常比其他繼電器短, 隨著技術不斷提升,電磁式機械繼電器的機械壽命也更長了,但致動效能還是不能與同級的簧片繼電器相提並論。電磁式機械繼電器與其他繼電器一樣,整體的使用壽命很容易受到功率切換量與其他系統考量所影響。實際上,電磁式機械繼電器的機械壽命可能不及簧片繼電器,但就電子使用壽命而言,此繼電器在相同的負載下 (尤其是電容性負載) 通常比較不易衰退。相較於同級的簧片繼電器,電磁式機械繼電器的接點更大、更堅固、也更耐用。
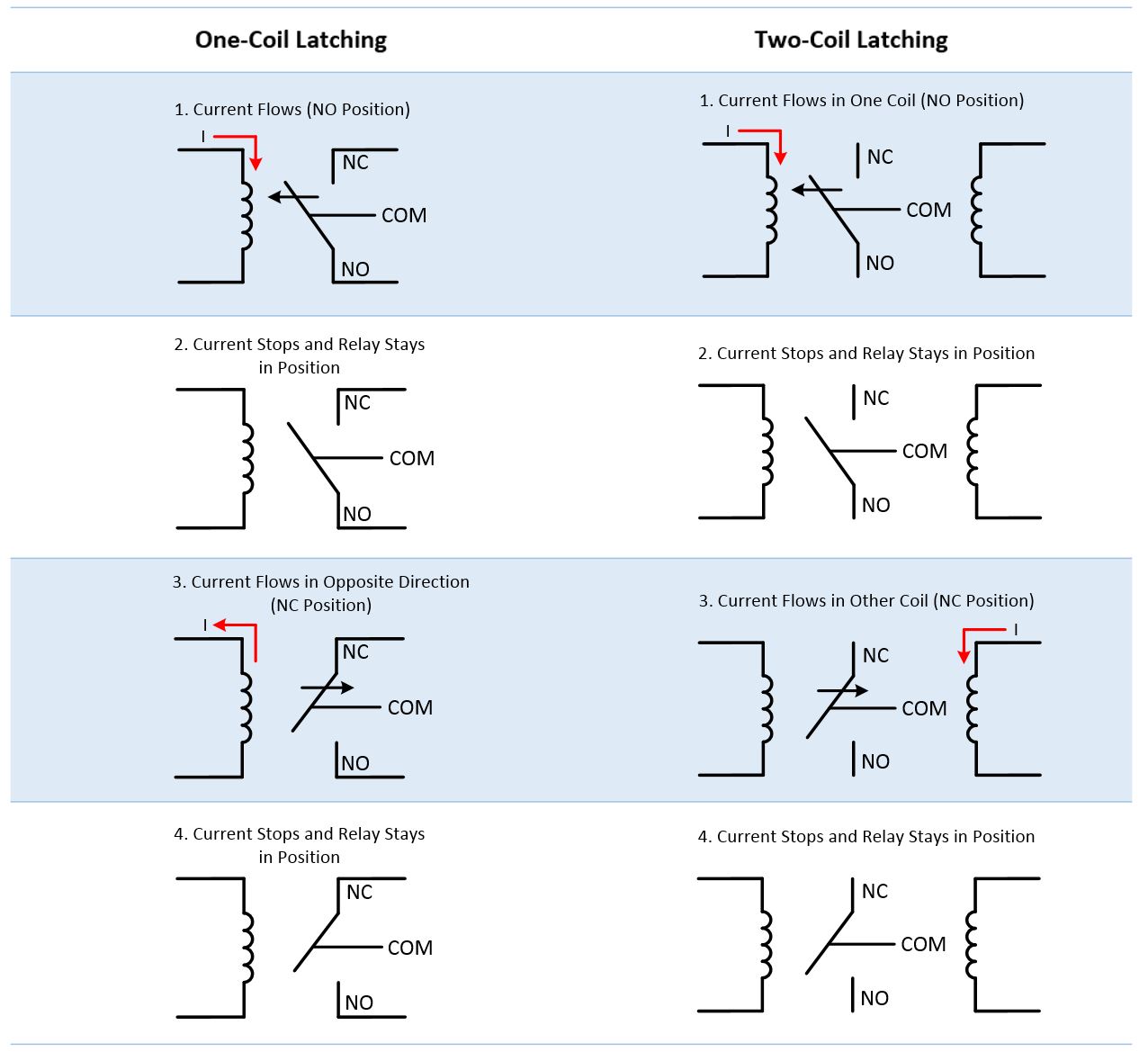
電磁式機械繼電器分為鎖存式 (latching) 與非鎖存式 (non-latching) 兩種。 致動之後,鎖存式繼電器仍會維持原本的狀態。 鎖存式繼電器並無預設位置,在驅動電流停止之後,將停留在最後的位置。 鎖存式繼電器具備內部磁鐵,能在電流開始流動之後固定繼電器,藉此降低耗電量,這是因為致動之後,繼電器不需電流就能維持不動。 因此,鎖存式繼電器非常適用於必須限制耗電與散熱的應用。 由於線圈不會因發熱而產生熱電動勢 (EMF) 並影響量測結果,因此超低電壓應用大多使用鎖存式繼電器。
鎖存式繼電器可能具備 1 或 2 個線圈。 單線圈鎖存式繼電器的電流方向決定了電樞的位置。 雙線圈鎖存式繼電器則是由電流通過的線圈來決定電樞的位置。
圖 10. 鎖存式線圈在致動後維持不動。 單線圈鎖存式繼電器的電流方向決定了電樞的位置。 雙線圈鎖存式繼電器的電樞位置則是由電流通過的線圈決定。
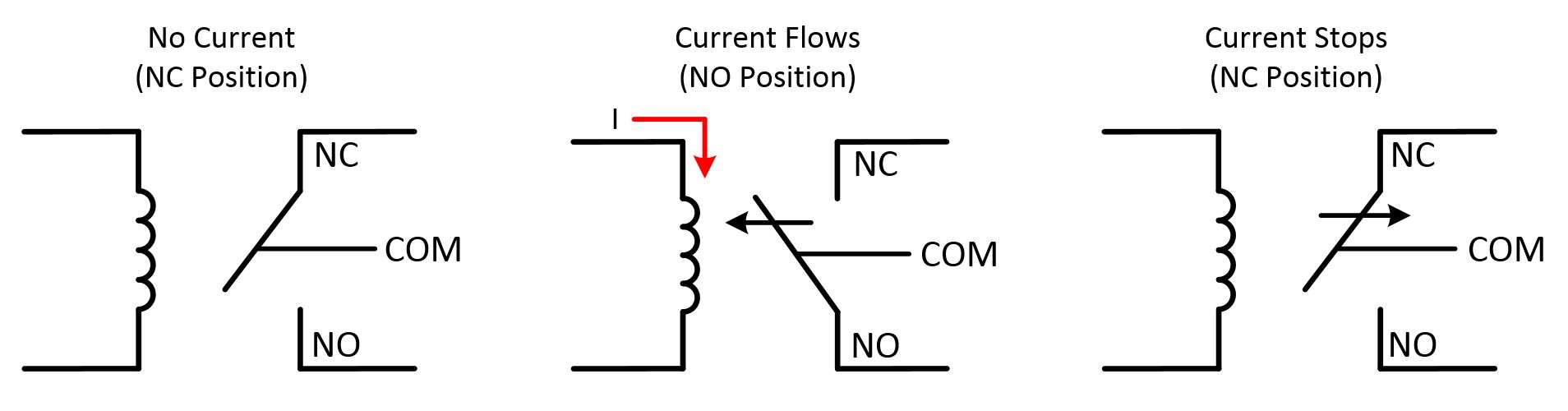
相較之下,非鎖存式繼電器只有在致動時才會維持原本的狀態。
在無電流通過的情況下,簧片或永久磁鐵的作用力會把非鎖存式繼電器固定在最初的位置上。 當電流通過線圈的時候,磁場的磁力將固定於 NO 接點。 電流停止時,繼電器又會回到原先的 NC 位置。 對於部分控制應用而言,切換器必須在電力中斷時回到已知狀態,在這個情況下,非鎖存式電磁式機械繼電器便相當實用。 此繼電器經常用於按鈕應用,例如鍵盤或微控制器輸入按鈕。
圖 11. 非鎖存式繼電器只有在致動時才會維持原本的狀態。對於部分控制應用而言,切換器必須在電力中斷時回到已知狀態,在這個情況下,非鎖存式電磁式機械繼電器便相當實用。
簧片繼電器
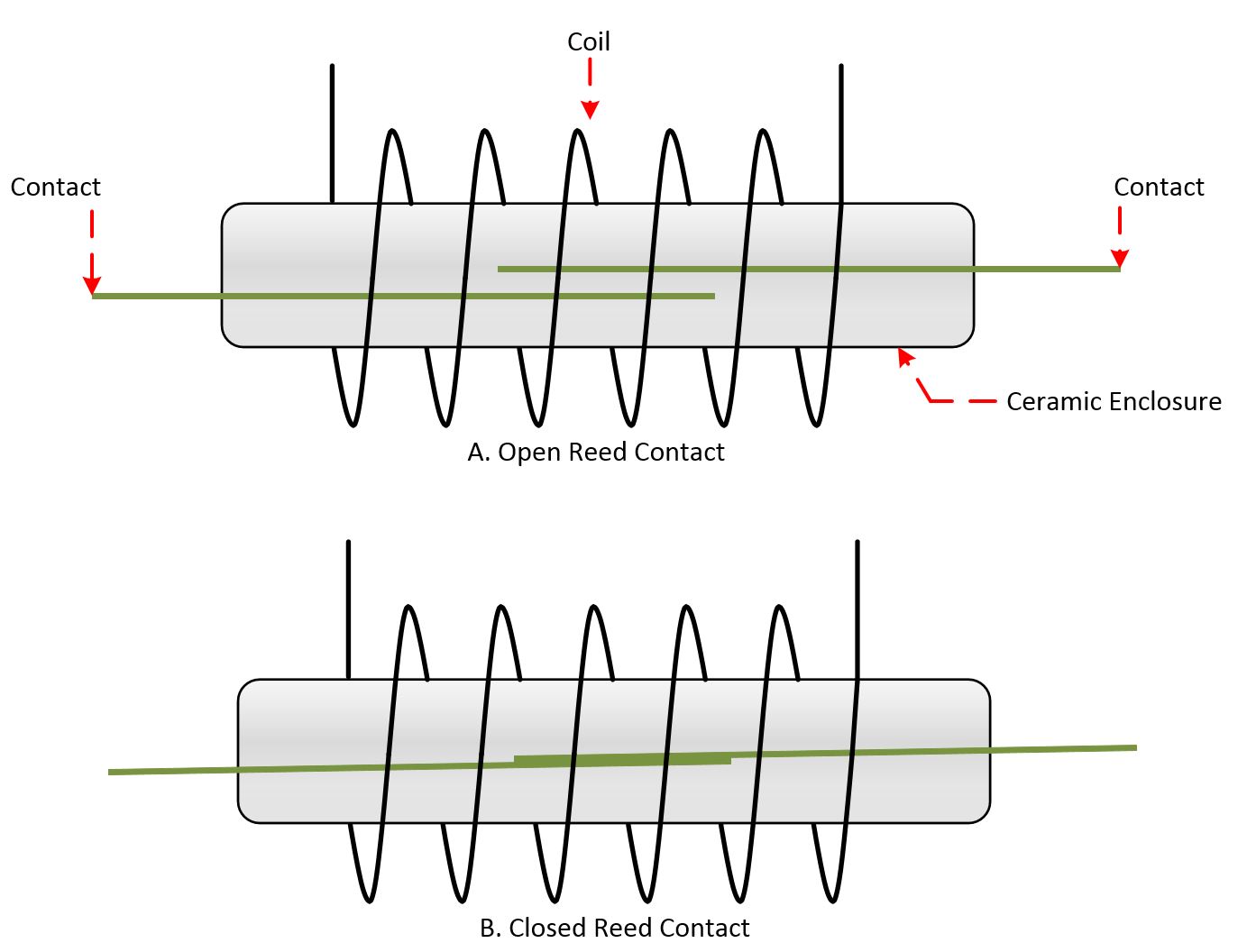
簧片繼電器使用電磁鐵控制一或多組簧片切換器。 雖然簧片繼電器與電磁式機械繼電器都配備實體接點,並可使用機械啟動的方式來開啟或關閉路徑,但簧片繼電器的接點尺寸遠小於電磁式機械繼電器,而數量也相對較少。乾式簧片繼電器由圍繞著簧片切換器的線圈所組成, 簧片切換器包含 2 片密封於玻璃或陶瓷管中的強磁性葉片 (稱為簧片),管內充滿惰性氣體。簧片的重疊端上有接點,當線圈通電時,2 片簧片會受到牽引,使接點互相接觸,並在繼電器上形成通路。 一旦線圈停止通電,簧片的彈力就會分開接點。
由於簧片繼電器的移動式零件相當輕巧,因此切換速度比電樞繼電器更快,消耗的電力也較少。 然而,簧片繼電器卻較容易被電弧損壞。 電弧火花在各接點間跳動時,往往會造成一小部分的簧片熔化; 如果接點熔化的部分在關閉狀態時重新凝固,接點就可能會焊接在一起。 簧片的彈力通常不足以斷開焊接,導致簧片在開路狀態時相黏。
圖 12. 簧片繼電器的電流通過線圈時會產生磁場,進而牽引 2 片簧片並使接點互相接觸。
由於簧片繼電器的接點較小、數量較少且啟動機制不同,因此切換速度是同級電磁式機械繼電器的 10 倍之多。 簧片繼電器的機械使用壽命也比電磁式機械繼電器更長。 但缺點是接點面積較小,比較容易在關閉電路時被電弧損壞。電弧在各接點間跳動時,往往會造成一小部分的接點表面熔化, 如果接點熔化的部分在關閉狀態時重新凝固,接點就可能會焊接在一起。 驅動電流關閉後,簧片的彈力通常不足以斷開焊接,導致繼電器無法使用。 雖然電磁式機械繼電器也可能因電弧而受損,但電力要夠大才有可能造成損害。
由於簧片繼電器非常容易發生接點損壞,因此必須特別留意系統電容產成的浪湧電流 (Inrush Current)。繼電器與電容之間的串聯阻抗 (如電阻或磁體) 可以控制浪湧電流。無論此電流是來自無功 (Reactive) 待測裝置或抗雜式連接線,系統中的任何電容都可能產生浪湧電流。
簧片繼電器採用強磁性材質,比同級的電磁式機械繼電器更容易產生嚴重的 EMF,並引發過多雜訊且造成量測結果出錯,因此不適合超低電壓應用。
簧片繼電器的尺寸較小且速度極快,非常適合多種切換應用。 簧片繼電器多半用於矩陣與多工器模組中,通用模組較少使用簧片繼電器。
固態繼電器
固態繼電器 (SSR) 是一種電子切換器,會在小型外部電壓輸入端點時致動。 SSR 具備能夠回應輸入的感測器、可將電力切換至負載電路的固態電子切換裝置,並具備偶合機制,不需機械零件即可啟動控制訊號。
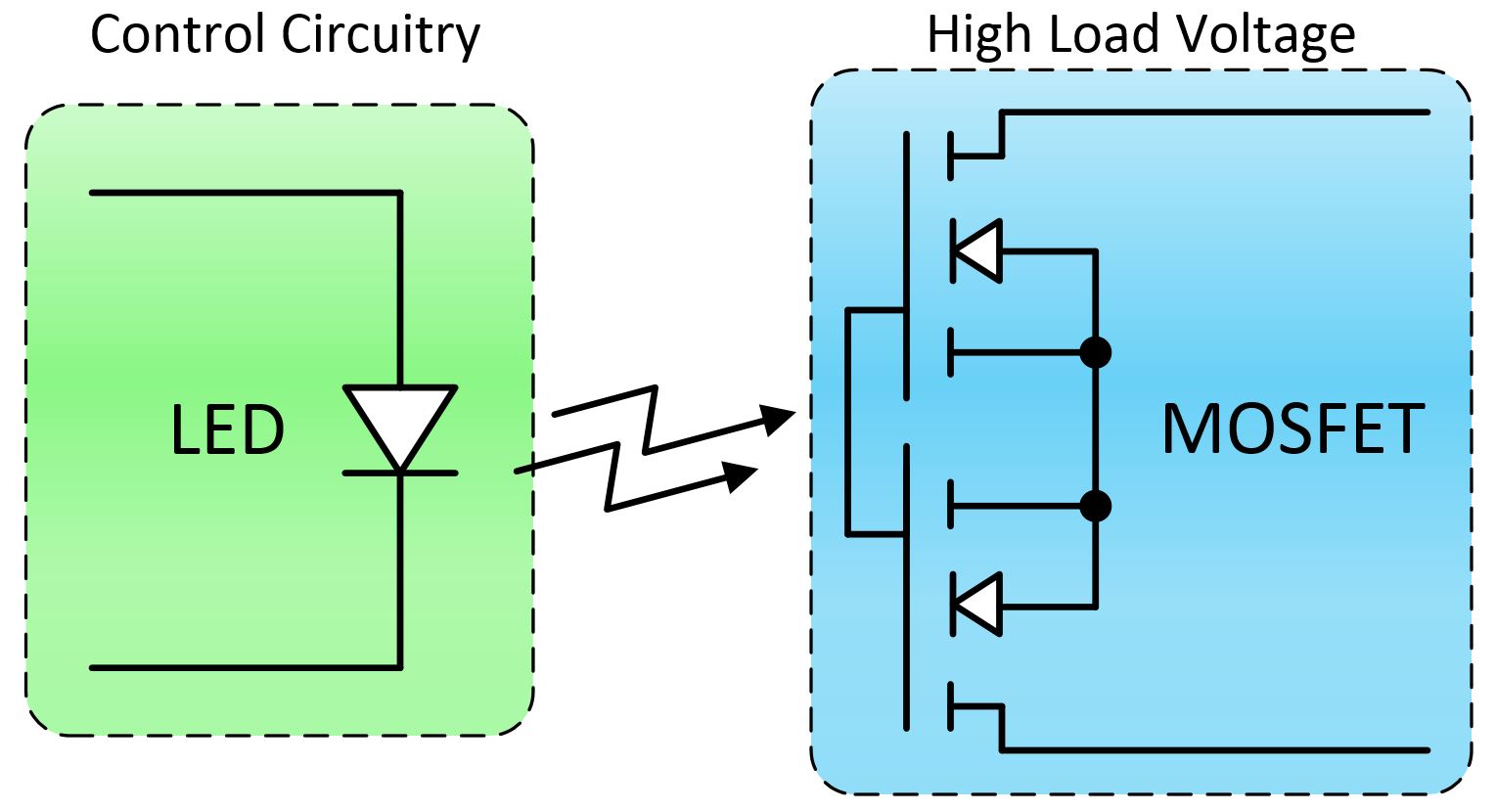
SSR 使用配備 LED 的光感應金屬氧化半導體場效電晶體 (MOSFET) 裝置來啟動裝置。
圖 13. 就 SSR 而言,LED 所發出的光線將啟動光感應 MOSFET,並讓電流通過。
由於切換時間視開關 LED 電源的時間長短而定 (一般約為 1 ms 與 0.5 ms),因此其切換速度高於電磁式機械繼電器。 SSR 沒有機械零件,因此使用壽命較機電繼電器或簧片繼電器高。 這項特色也讓 SSR 比較不受物理振動影響。 不過 SSR 和電磁式機械繼電器與簧片繼電器不同,SSR 主要使用電晶體而非實體金屬建立連結,因此接觸電阻較高。 雖然 SSR 的接觸電阻已因技術進步而獲得持續改善,然而目前製程中電阻超過 100 Ohm 的繼電器仍然相當普遍。
SSR 產生的雜訊較低,但卻沒有電磁式機械繼電器那樣穩定。如果使用時的訊號準位超過標準,SSR 往往會像簧片繼電器一樣因浪湧電流而損壞。 雖然 SSR 並沒有會熔化的金屬接點,但 MOSFET 一旦遭到破壞,繼電器也就無法使用了。
最後,SSR 的價格通常比其他切換器更高, 散發的熱能也較多。 SSR 適合高電壓應用並常見於矩陣與多工器。
FET 切換器
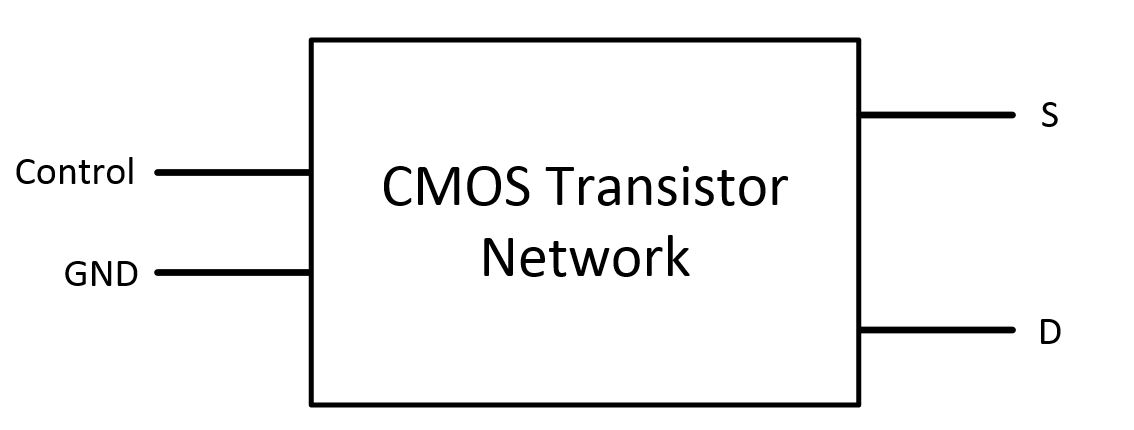
FET 切換器使用一系列 CMOS 電晶體建置切換功能, 將電壓供應至連接電晶體網路 (負載電路) 源極與汲極的控制電路。
圖 14. 控制電路將直接驅動 FET 切換器的電晶體閘極,藉此提升低電壓訊號的切換速度。
FET 切換器和 SSR 一樣,都不是機械裝置。與 SSR 不同,FET 切換器的控制電路不需驅動 LED,即可直接驅動電晶體閘極。 由於開啟/關閉 LED 的時間不會構成問題,因此直接驅動電晶體閘極可達到更快的切換速度。本文介紹的切換器中,FET 切換器的速度最快。由於封裝中並不包含機器零件或 LED,因此 FET 切換器可擁有極小的尺寸。 FET 切換器的主要限制是缺乏實體的隔離障礙,因此僅能搭配使用低電壓訊號。
由於同為 FET 架構,因此這款切換器的優缺點均與 SSR 相似。 舉例來說,FET 切換器的不僅使用壽命極長,路徑電阻也遠高於電磁式機械繼電器或簧片繼電器。
FET 切換器適合更高速的低電壓應用,並常見於多工器設定。
整體而言,電磁式機械繼電器是相當良好的通用式解決方案,然而封裝尺寸、切換速度與機械壽命均受到限制。簧片繼電器的封裝尺寸、密度與速度均有所改善,但因可能產生浪湧電流,耐用度較差。 SSR 雖可替代機械繼電器,但卻會產生較高的路徑電阻。 FET 切換器則為高速、低成本的解決方案,但只能用於低電壓應用中。
3. 簡介
- 切換器是一種可以用來建立/中斷電路連結的裝置。
- SPST 切換器可控制單一電路,並連接單一輸出, 適用於僅需開關狀態的應用。
- SPDT 切換器可將單一輸入電路路由至 2 個輸出電路的其中之一, 適合在 2 個選項中進行選擇。
- DPDT 切換器就如同透過單一致動器執行切換的 2 個 SPDT 切換器。 此切換器因可交錯連接端點,而經常用於相位或極性逆變。
- 電磁式機械繼電器是以電力操作的切換器,使用機械接點做為切換機制。 電磁式機械繼電器是相當良好的通用式解決方案,然而封裝尺寸、切換速度與機械壽命均受到限制。
- 鎖存式繼電器在致動之後,仍會維持原本的狀態。
- 非鎖存式繼電器只有在致動時才會維持原本的狀態。
- 簧片繼電器使用電磁鐵控制一或多組簧片切換器。 簧片繼電器的封裝尺寸、密度與速度均有所改善,但因可能產生浪湧電流,耐用度較差。
- 通用拓撲切換器包含一組獨立的切換器或多個 SPST、SPDT 或 DPDT 切換器。 這些切換器在高電流負載時相當實用,例如功率與負載切換。
- 多工器 (mux) 是另一種形式的拓撲。您可以將多工器的單一輸入連接至多個輸出,或將單一輸出連接至多個輸入。
- 有了這種矩陣拓撲,便能夠將多個輸入連接至多個輸出,且組織結構呈行列形式。
- 固態繼電器 (SSR) 是一種電子切換器,會在小型外部電壓輸入端點時致動。 SSR 雖可替代機械繼電器,但卻會產生較高的路徑電阻。
- FET 切換器使用一系列 CMOS 電晶體建置切換功能, FET 切換器為高速、低成本的解決方案,但只能用於低電壓應用。
4. 額外的儀控資源
深入了解多合一儀器在單一裝置上所提供的功能,例如混合式訊號示波器、函式產生器、多功能數位電錶、可程式化 DC 電源供應器與數位 I/O,另外還可整合 PC 或 iPad,提升電路設計的除錯與檢驗效率。
測試用切換器
不論是要在多個測試點執行高精度或慢速量測,或是積體電路的高通道數、高頻率特性參數描述作業,均可進一步了解 PXI 或 SCXI 架構的模組化切換解決方案,此方案可大幅提升設備再使用率、測試輸出率與系統可調整性。