Source: https://www.2cm.com.tw/2cm/zh-tw/tech/B8621B3CA49446569786794C1A20291C
結合連線/離線式架構優勢 A-GPS定位效能再升級

A-GPS大幅縮短TTFF 準確衛星時間扮要角
要建置A-GPS技術,必須先從衛星訊號接收的基本原理開始認識。在沒有輔助訊號的自主定位(Autonomous Positioning)模式下,GPS接收器必須從天空中完整接收到四顆以上的衛星訊號,才能順利解出終端用戶所在的三度空間位置。這個過程包括三個階段:衛星搜尋(Acquisition)與訊號下載、追蹤(Tracking)和導航(Navigation),又以第一階段最耗時間。
在前面幾期新通訊元件雜誌專欄中已經介紹過衛星訊號的組成,在此就不再贅述。衛星訊號的每個訊框,提供衛星的星期時間(Time of Week, TOW)、廣播星曆(Broadcast Ephemeris)、電離層參數及萬年曆(Almanac)等資料,這些資料的取得決定了定位所需的時間與準確性。其中廣播星曆為個別衛星本身的精確軌道位置,每小時更新一次,每次更新有效性約4小時;萬年曆則為所有衛星在軌道上的概略位置及其狀況等,每天更新一次,有效時間可達數週。
要完成定位,關鍵資料是衛星訊框中的前三個子訊框,即廣播星曆和星期時間、時間改正係數等,完整下載至少需要18秒鐘。然而,當用戶處於建築物林立的街道中、騎樓下,甚至是室內環境中,由於訊號接收條件差,只要有一些訊號未被完整的下載,就得再重複30秒的訊框下載。衛星訊息組成及接收所需時間請參考圖1。
 |
| 圖1 衛星訊息組成及接收所需時間 |
因此,雖然同樣是A-GPS,但提供準確衛星時間(Precise GPS Time)或粗略衛星時間(Coarse GPS Time),對定位速度影響差異甚大(圖2)。當GPS接收器預先獲得廣播星曆和同步準確性小於400微秒的準確GPS時間,此時將可得到最佳定位速度,如冷啟動TTFF只需4秒。這是因為兩項資料讓待搜尋頻率和訊號延遲視窗(Window of Code Delay)範圍變小;此外,準確的GPS時間能夠用來計算衛星位置,而且可跳過對TOW的求解。
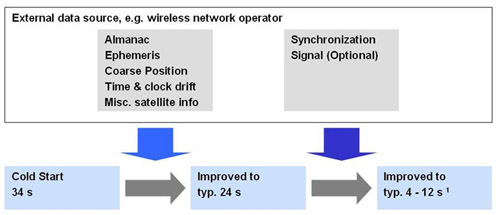 |
| 圖2 透過輔助資料有助於加速定位,額外的同步訊號能進一步縮短定位時間。 |
一旦衛星時間不夠準確,就無法有效預估訊號延遲視窗,若要達到與具有準確時間相同的表現,將需要500倍的搜尋資源。此外,因為衛星速度達每秒800公里,太快的速度也無法求得精確的衛星位置,將和自主式模式一樣必須求解TOW,這會造成定位時間拉長至6秒,在弱訊號下更無法解碼。雖然還有另一個方式是求解衛星時間,不過這需要多一顆衛星的資料,也就是五顆衛星才能進行定位。 在了解A-GPS的原理與優勢後,接著來談談A-GPS的建置方法。要取得衛星定位輔助資料有兩種方式,一是即時性的透過GSM、GPRS、CDMA或UMTS等行動通訊系統來取得,也就是連線式A-GPS(Online A-GPS);另一種是採離線(Offline),也就是依使用者的方便,透過行動網路或直接由網際網路預先下載衛星資料,當需要時就能做為輔助定位之用。
連線式A-GPS提供即時資訊
由於衛星的軌道資料會定時更新,因此理想上最好能夠即時獲得最新的輔助資料,這就得採用連線式A-GPS模式。不過,既然是連線方式,其獲取資料的速度就會受到行動網路速率的影響,這是較不可控的因素。CDMA和GSM/GPRS的協定中都定義出A-GPS手機的最低運作效能標準:CDMA的標準定義在3GPP2 C.S0036-0(TIA 916),GSM/GPRS則是3GPP TS 25.171。其中CDMA要求最大的反應時間,即最長的TTFF是在16秒之內,GSM則是20秒。目前各家的解決方案都致力於滿足這項要求。
當支援A-GPS的終端啟動時,它會同時接收來自天空中的衛星訊號,並從行動網路的基地台獲取輔助資料,這些資料並不儲存在GPS接收器或系統的記憶體中,而且每次啟動連結時,資料都會更新。在終端與基地台的連結介面上,A-GPS的發展可分為政策導向和市場導向,其中政策導向的語音緊急服務因需要高可靠性的定位功能,因此產生了控制平面(Control Plane)架構;市場導向的LBS或導航應用,強調透過無線資料傳輸來達成的定位應用服務,因此產生了用戶平面(User Plane)架構。
控制平面和用戶平面的差異在於,前者是專為緊急救援而設計,目的是要讓手機能提供隨時隨地的定位功能,因而不允許其他應用優先於此需求,例如為了強化GPS接收器的靈敏度而優先進行戶外的定位;相較之下,用戶平面被使用在非緊急的應用上,其目的是要縮短TTFF的時間及提升定位的準確性。進一步解釋如下:
| ‧ | 控制平面 | ||||||||||||||||||||
A-GPS只是定位技術之控制平面標準的一種,其他還包括基於CDMA通訊技術的進階前向鏈路三角定位(Advanced Forward Link Trilateration, AFLT)、WCDMA的觀察到達時間差(Observed Time Difference of Arrival, OTDOA)和GSM的強化到達時間差(E-OTD)等。因此,控制平面中的終端設備(Mobile Station, MS)可以是本身具有GPS接收器的手機,也可以是普通手機;通訊架構中各個單元的功能基本上維持不變,但為了支援位置服務,必須新增閘道伺服器(Gateway Server)、定位伺服器(Positioning Server)和定位業務(Location Services, LCS)終端。控制平面標準與架構定義如表1。
| |||||||||||||||||||||
| ‧ | 用戶平面 | |||||||||||||||||||||||||
用戶平面主要以TCP/IP做為資料傳送方式,目前包括CDMA、3GPP2和OMA都制定出用戶平面的標準,其中OMA制定的安全用戶平面位址(Secure User Plane Location, SUPL)獲得業者普遍的支援。用戶平面標準與架構定義如表2。SUPL透過將RRC、RRLP等訊息包裹為一致性的規格後再發送出去。其定位的運算通常也在用戶端(MS-based),能減少網路成本及維護管理上的需求;若是主要運算端為網路伺服器,則稱為MS-assisted。
| ||||||||||||||||||||||||||
離線式A-GPS不受服務品質影響連線效率
由於連線式容易因行動通訊商的服務品質及用戶所在位置而影響連線效率,而且會受限於行動通訊商的管理,因此發展出離線模式。採用離線式A-GPS,用戶只須在外出定位前,先透過行動網路或網際網路從伺服器端中取得輔助資料,下載後即可中斷連線。當啟動GPS功能,這些資料就會用來協助定位,同樣能加速定位所需的時間。離線式A-GPS服務架構如圖3。
 |
| 圖3 離線式A-GPS服務架構示意圖 |
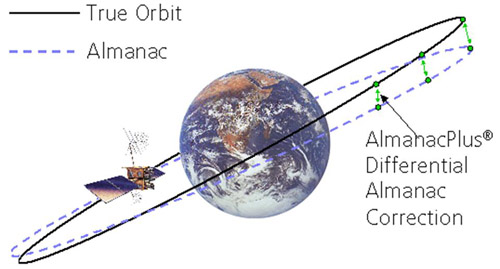 |
| 圖4 透過差分萬年曆修正資料來提升軌道預測的準確度 |
連線/離線可並行 A-GPS效能加倍
具備GPS功能的終端設備要支援A-GPS並不困難,若要採用連線式,則須考慮是採用MS-based或MS-assisted模式,也就是定位運算的主體在終端或伺服端。MS-based較為單純,在取得網路輔助資料後,就回到獨立運算的狀態,但對終端系統的運算資源要求較高;MS-assisted則較為複雜,終端器將接收到的衛星訊號資料傳送給網路伺服器,由伺服器計算出結果後再將位置資訊送回給終端器,此舉雖能降低終端器的運算負荷,而且能進行較複雜的運算以取得更精確的位置,但對於連線品質要求甚高,一旦在過程中失聯就會失去定位結果。
在記憶體需求方面,連線式只需一些即時的資料,對於記憶體容量的要求極低,每次下載的檔案大小只有1~3KB;離線式的記憶體需求量也不大,下載1天的衛星預測資料,大約只需要10KB,14天的預測資料量則約為90KB。這些資料通常儲存於非揮發性的快閃可擦除可程式唯讀存儲器(Flash EPROM)中,而依系統架構的不同,有的GPS接收器會配置記憶體,可以直接溝通;另一種架構則是使用主處理器的記憶體來儲存,可節省記憶體的成本與占用空間(圖5)。
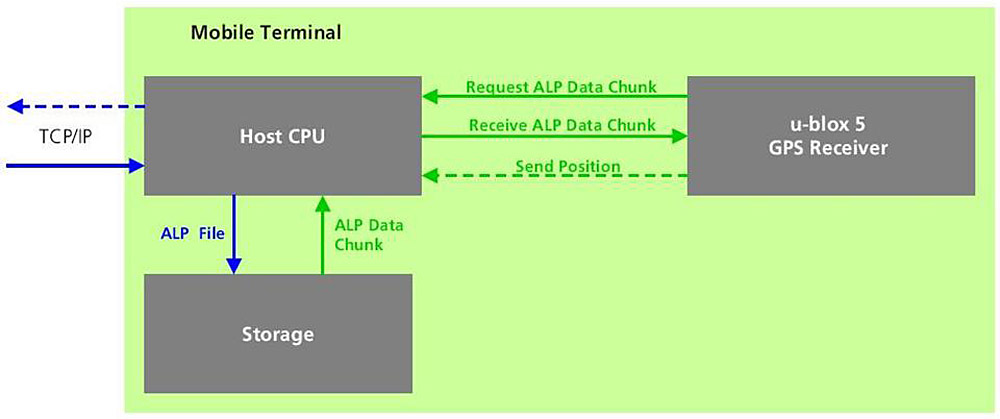 |
| 圖5 GPS接收器透過主處理器取得儲存資料的運作架構 |
對於GPS市場的既有業者來說,手機開始內建GPS功能無疑是一大利多,這意味著整個市場將大幅擴展開來。不過,手機的GPS應用與PND大為不同,訴求目標已從車載導航轉移到個人用途,因此須要在更多樣的使用環境下獲得快速的定位服務,而A-GPS就成了不可或缺的一項實現技術。
(本文作者任職於u-blox)
沒有留言:
張貼留言